1 概述
玄武上位机软件用来将电子控制器中的应用程序和数据,从PC端下载到电子控制器上。支持UDSonCAN、UDSonEth、UDSonK-Line、UDSonLIN协议。提供客户协议定制集成,广泛应用在电子控制器产品开发阶段,测试阶段,售后服务阶段。
知从玄武程序刷新与诊断测试工具可应用于OEM和Tier1多种应用场景下。用户可以方便的在实验室,试验车辆以及实车上方便的进行程序刷写工作。
玄武上位机软件目前应用于各类电子控制器的程序刷写:
Ø 车身控制器 (BCM)
Ø 空调控制器
Ø DC/DC控制器
Ø 电子助力转向控制器
Ø 发动机控制器 (EMS)
Ø 变速箱控制器 (TCM)
Ø 电池管理系统 (BMS)
Ø 整车控制器 (VCU)
Ø 电机控制器 (MCU)
Ø 电动助力转向系统 (EPS)
Ø 防抱死制动系统 (ABS)
Ø 电子稳定性控制程序 (ESP)
Ø 主动防撞系统 (ACC)
Ø 牵引力控制系统 (TCS)
Ø ADAS控制器
2 以太网刷写介绍
在智能网联汽车发展的时代潮流中,随着处理器运算能力与硬件性能的快速提升,众多创新在汽车领域得以迅速落地。汽车电子控制器在整车中的占比持续攀升,与之相应的是,连接 ECU 的网络带宽需求也大幅增加,这一需求已远远超过 CAN 等传统车载网络的容量上限。此外,随着车辆网联化、智能化进程的推进,云计算与大数据技术的应用,以及高级驾驶辅助系统(ADAS)的广泛普及,构建全新的电子网络总线平台已成为新一代汽车发展的必然选择。
传统的车辆诊断通常依赖于专用的诊断工具和设备,限制了远程诊断和跨设备的兼容性。随着互联网协议(IP)的普及,DOIP作为一种基于IP的诊断技术应运而生,它支持通过以太网和Wi-Fi等标准网络进行通信,能够更快速、更灵活地进行远程诊断。
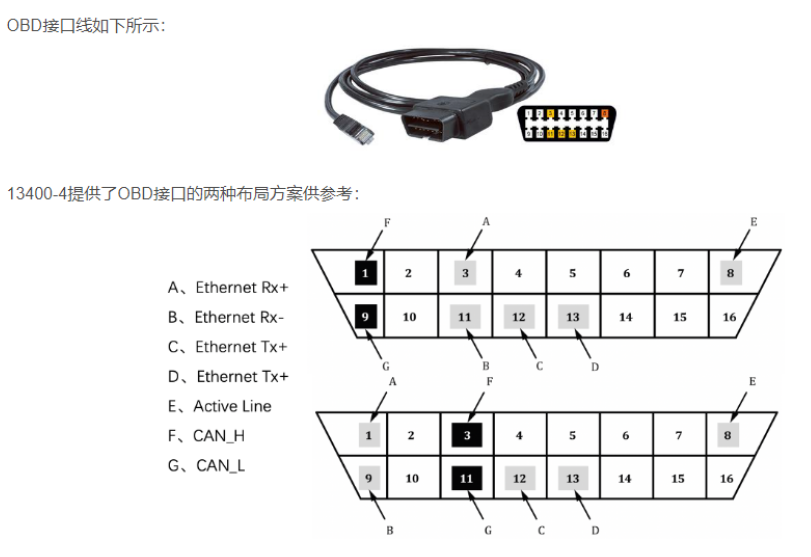
2.1 物理层 Physical Layer
100Base-Tx,OBD接口如下:
2.2 TCP/UDP层 TCP/UDP Layer
TCP 是一种可靠的传输层协议,它确保数据包正确无误地从源传输到目的地。在 DoIP 中,TCP 用于需要高可靠性的诊断通信,如 ECU 编程。TCP 通过三次握手过程建立连接,确保两端的通信是同步的,并且通过序列号和确认应答机制保证数据的顺序和完整性。
Ø 车内所有 DoIP 实体均应实现 TCP;
Ø TCP 使用一对端口号来标识连接,TCP 连接时目的端口应当是 TCP_DATA;
Ø DoIP 实体应在创建 socket 之后监听 TCP_DATA,用于与试图连接 DoIP 实体的外部测试设备建立通信;
Ø 外部测试设备应支持多个 TCP_DATA socket,本地端口将在创建 socket 时自动选择,远程端口应为 TCP_DATA。
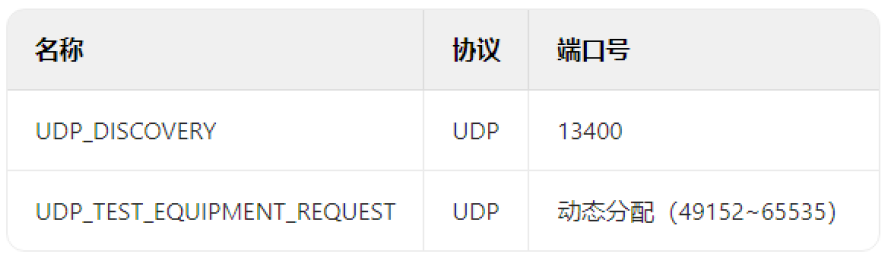
UDP 是一种无连接的协议,它允许数据包在没有事先建立连接的情况下发送。这种方法减少了开销,使得通信更快,但也牺牲了可靠性。在 DoIP 中,UDP 用于那些不需要确认的服务,如车辆发现或基本诊断请求。
车内所有 DoIP 实体均应实现 UDP当需要外部设备对车辆 IP 节点进行广播或多播消息请求时,由于 TCP 的传输机制限制无法实现,因此须使用 UDP。
2.3 Doip 协议 Doip Protocol:
Doip总共有三类报文:节点管理类、诊断类和节点状态类。
负载类型 | 取值 |
节点管理类 | 0x0000 - 0x0008 |
诊断类 | 0x8001 - 0x8003 |
节点状态类 | 0x4001 - 0x4004 |
预留 | …… |

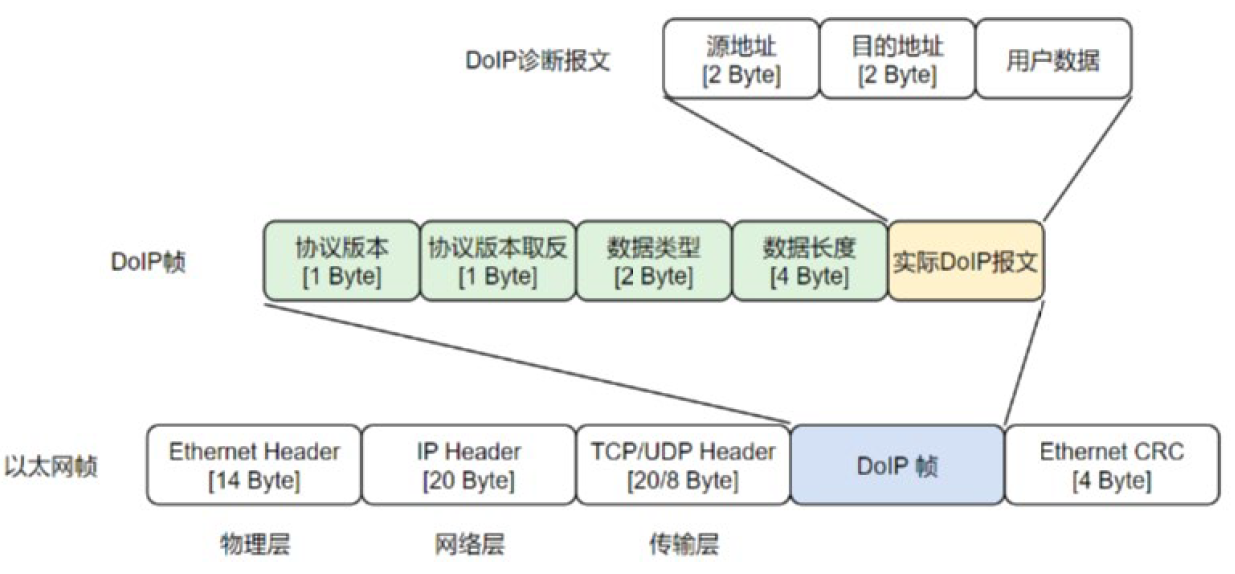
Doip在 OSI 模型中位于传输层,故 Doip报文发送前要封装 ETH 首部、IP 首部及 TCP/UDP 首部,Doip数据作为 SDU 层层向下传递,直至构成完整的以太网帧,通过物理层的介质发送出去。封装格式如下所示:
3 玄武Doip刷写介绍
3.1 硬件连接 HardWare Connect
将RJ45端口连到电脑端,另一端与ECU相连,另一端需要根据ECU当前端口进行适配,常见端口有RJ45或者OBD。

3.2 刷写配置 Flash Config
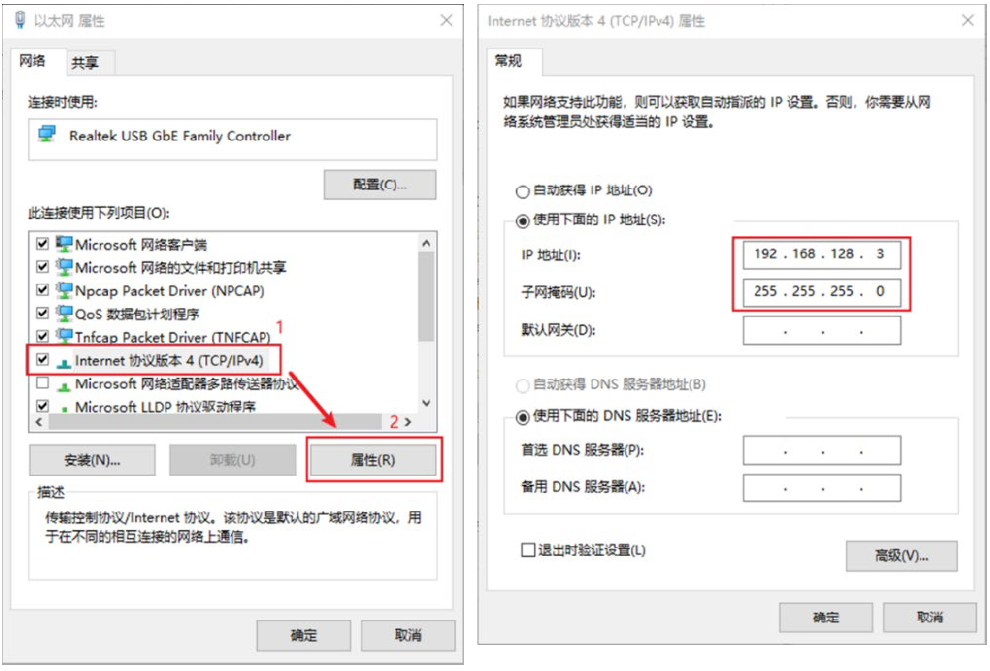
根据ECU当前的IP地址,在网络适配器中将电脑与ECU设置处于同一网段下。
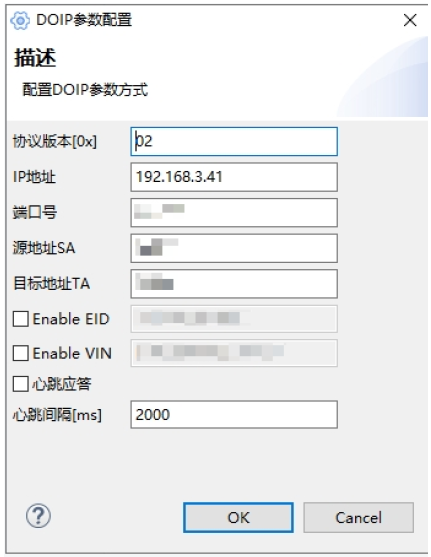
玄武打开以后,根据需要设置ECU的配置信息。
还可以对维持上位机和ECU之间的TCP连接进行心跳设置。
3.3 连接及刷写 Connect and Flash
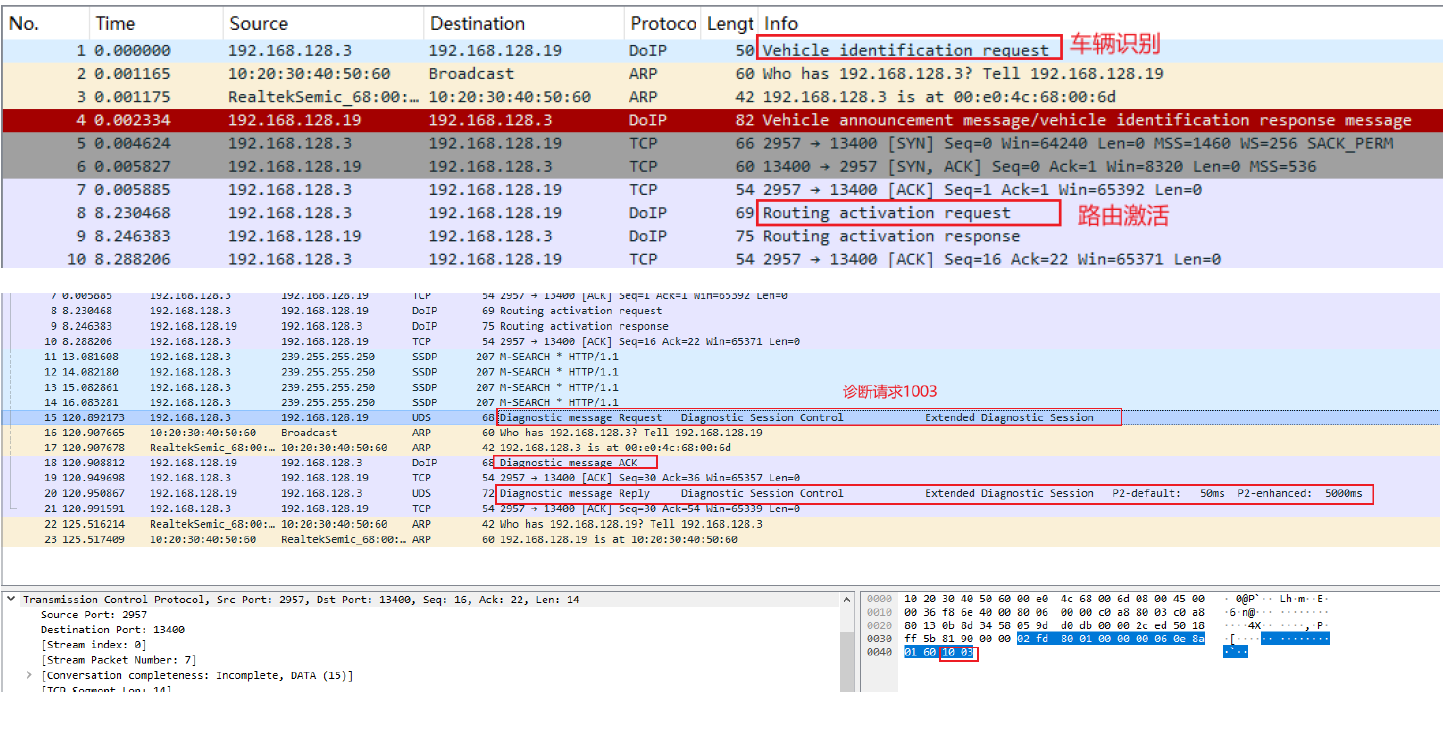
点击连接之后,玄武会自动发送车辆识别,路由激活等指令,成功和ECU建立连接之后,便可开始刷写。
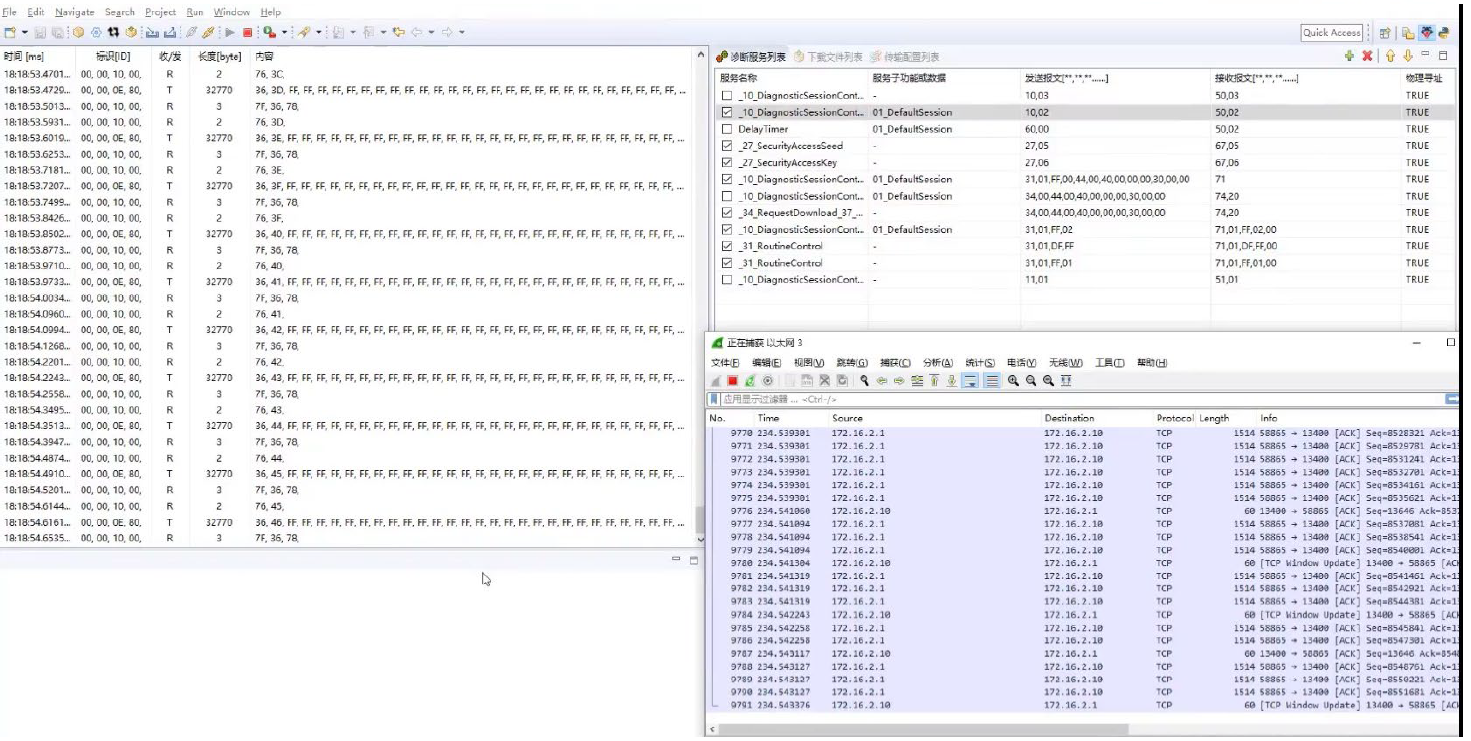
期间可通过WireShark工具进行抓包观察原始以太网报文。
4 证书

玄武软件著作权登记证书